Utilizing a Deep Learning human detection model with an agricultural field robot powered by Deep Learning
14 November 2022
Robotti, an agricultural field robot made by AgroIntelli, weighs approximately 3 tons and drives autonomously at 5 km/hr. Combining the large weight and the speed with its ability to drive autonomously means it poses a safety risk to humans, especially curious bystanders. AgroIntelli has designed overlapping safety systems and helping functions to help reduce the safety risk to humans. However, even with requiring a physical fence, it is possible that someone could climb over the fence and enter the area where Robotti is operating. In such case, the 3 most important measures are the remote supervision surveillance cameras, and two collision detection sensors, i.e. the bumpers and the wheel safety guards.
Currently (2022) there are no clear EU legislation or standards (e.g. ISO) about autonomous field robots. What is required is to perform a risk assessment as described in Directive 2006/42/EC, but the company largely gets to decide what is considered safe in terms of autonomous driving. In addition, there are no clear rules or legislation about applying DL to a robot.
The current situation brings up some questions that need to be answered to address safety risks associated with autonomous field robots. How often does Robotti actually encounter a human? And where? Are there any patterns? Can we gain better insight into how safe does the robot needs to be?
Aiming to answer these questions, approximately 140k images were collected by Robotti’s forward-facing camera, FrontEye, in the 2022 farming season on one farm in Denmark. Using the human detection model trained by Aristotle University of Thessaloniki in the OpenDR project and combining the metadata of the images, a map of where people were found was created in QGIS, see figure xx. A total of 318 images were found with one or more persons detected in the image. It shall be mentioned that no false positives or negatives have been identified.
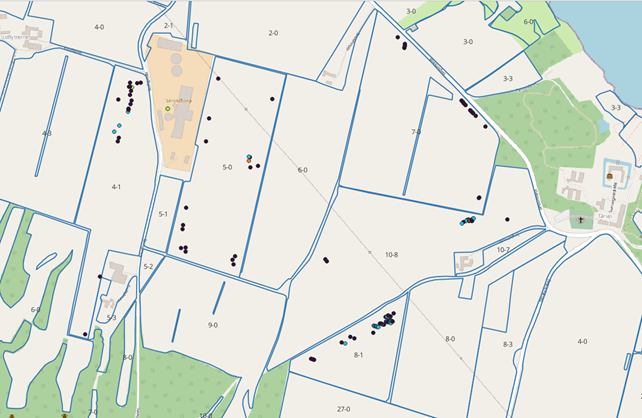
Fig. 1: GPS locations of the robot when a person was found by the human detection model. Map is visualized in QGIS.
One can observe that there is a clear pattern and the majority of the people were found alongside the field edges, likely in the headlands area. It is likely that the majority of the people detected were performing work in relation to Robotti.
The results of this study can potentially be used to optimize Robotti’s safety systems based on where Robotti finds a person. For example, in order to reduce the risk, AgroIntelli could reduce the speed of the robot when driving in the headlands. In addition, the human detection model trained by Aristotle University of Thessaloniki in the OpenDR project can be added to improve the robot’s safety.
Authored by: AgroIntelli team,
Agro Intelligence ApS, Denmark