Continual Learning for Robotics
4 September 2023
Opening the door for robots to leave their safe and highly structured lab environment to discover the open world poses a variety of new challenges. First and foremost, robotic systems will have to deal with situations they have never encountered before while continuing their assigned operation without interruption. This is particularly true for learning-based systems that are known to generalize poorly, hindering their general adoption for commercial robotic applications. Within the scope of OpenDR, we investigate applying the concept of continual learning to robotics. Continual learning describes a paradigm, in which a system is exposed to a sequence of new tasks that need to be learned in a consecutive manner. These tasks can comprise performing different actions such as grabbing various objects or adapting to a diverse set of environmental conditions, e.g., day versus night. In particular, we apply continual learning to the perception system of autonomous vehicles and propose methods that allow for online adaptation to previously unseen urban environments. Importantly and in contrast to pure domain adaptation, our developed methods must not only efficiently adapt but also prevent forgetting the accumulated knowledge.
Integrated into the OpenDR toolkit, we provide a method for visual odometry that can seamlessly adapt to new cities and across camera models without prior data samples or human supervision. Our approach, which we call Continual SLAM, consists of two separate subsystems that are inspired by mammalian brains. That is, in analogy to the hippocampus and the neocortex, one model learns the novel task while the second model memorizes previous experience. The latter one, referred to as Generalizer in Figure 1, comprises a replay buffer to store training samples, which can be revisited later to prevent forgetting. In contrast, the Expert focuses on the current environment exploiting the fact that domain changes do not occur suddenly but rather smoothly over time. We demonstrate that our approach allows performing visual odometry for autonomous driving in cities of different countries without prior data collection for domain-specific training.
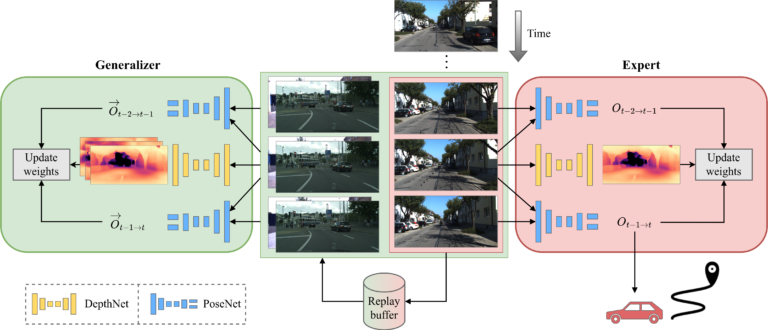
Fig 1:Our continual learning-based visual odometry Continual SLAM can seamlessly transfer to new unseen environments while maintaining high accuracy in previous domains.
We further transfer these findings to the task of joint monocular depth estimation and panoptic segmentation. Our method called CoDEPS is the first of its kind for this task, performing on-the-fly domain adaptation while preventing catastrophic forgetting. Similar to Continual SLAM, we leverage a replay buffer to maintain knowledge. Here, we further propose techniques to create this buffer if the storage capacity is limited. In this case, the main goal is to increase the diversity of the cached samples with respect to both semantic and raw image features. In Figure 2, we provide an example of how CoDEPS is able to progressively increase its performance on the previously unseen target domain without sacrificing results on the prior source domain.
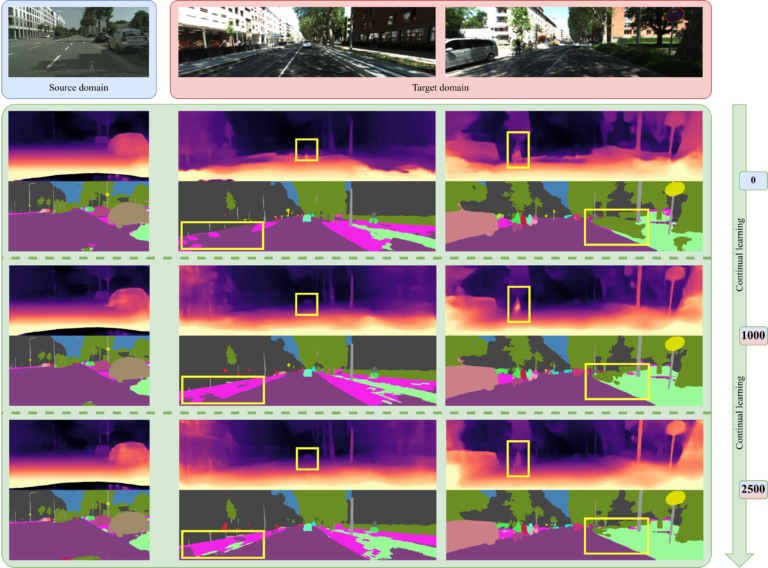
Fig 2: Our proposed CoDEPS can adapt from a source domain to a previously unseen target domain in an online fashion without requiring human supervision. The progressive adaptation is particularly visible in the image areas highlighted by yellow boxes.
Authored by Niclas Vödisch and Abhinav Valada
Albert-Ludwigs-University Freiburg, Germany